Previously, I received my BS from Yonsei University.
During my undergraduate studies, I was advised by Prof. Jaesik Park at Seoul National University and was an exchange student at the University of Toronto, where I worked with Prof. Florian Shkurti.
Email:
Actively Seeking PhD Positions for Fall 2026!
How to pronounce my name
My first name is pronounced "He-un-jin," with the "He-un" part spoken quickly. I'm also known as my nickname, HJ. My name in Korean is 김현진.
One paper on 3DGS sampling is accepted to NeurIPS 2025!
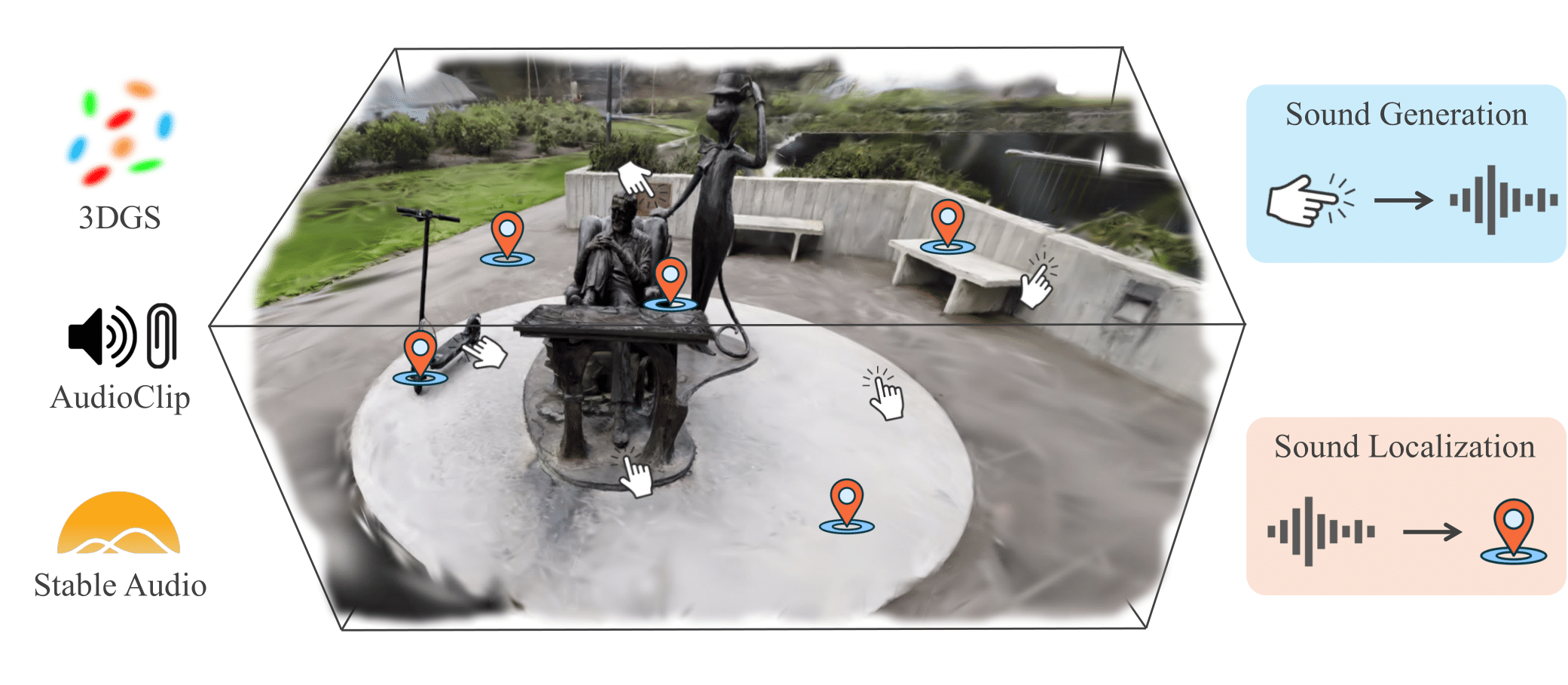
My research interests encompasses 3D computer vision and robotics. My research goal is to build computational systems capable of human-like scene understanding, such as perceiving complex environments and developing efficient world models that capture visual appearance and physical dynamics. To this extent, my current research focuses on developing physical multimodal world models and efficient 3D/4D scene reconstruction methods.
We introduce a reformulation of 3D Gaussian Splatting (3DGS) as a Metropolis-Hastings sampling process, replacing its heuristic-based densification with a probabilistic, adaptive mechanism.
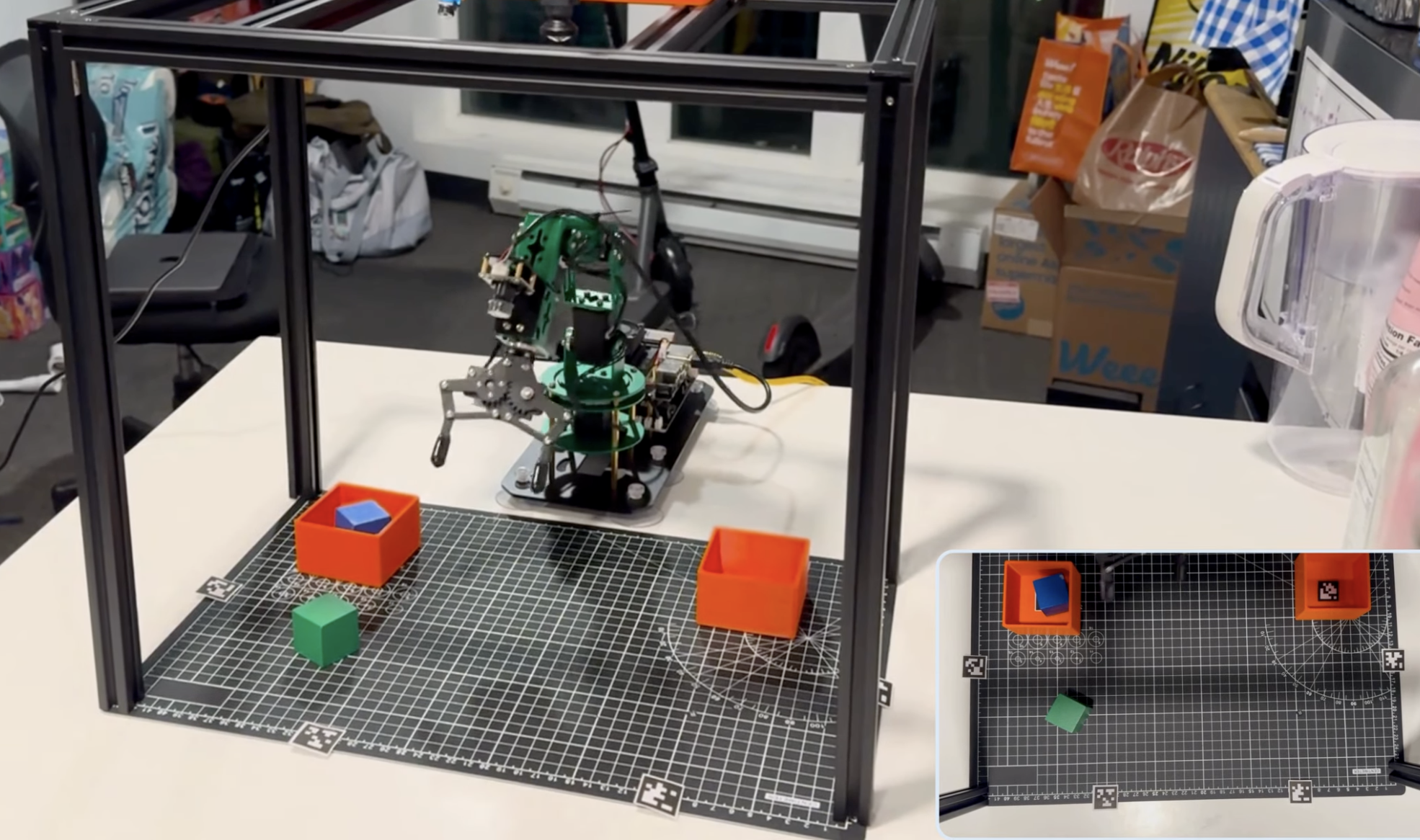
We built an end-to-end manipulation pipeline on Qualcomm's RB3 platform that achieves real-time, vision-guided pick-and-place through lightweight on-device perception, planning, and control.
Codebase for Qualcomm RB5 MBot Control Hyunjin Kim*,
Sohyun Yoo* Projects for UCSD CSE 276A: Introduction to Robotics, 2024
Project Videos /
Code
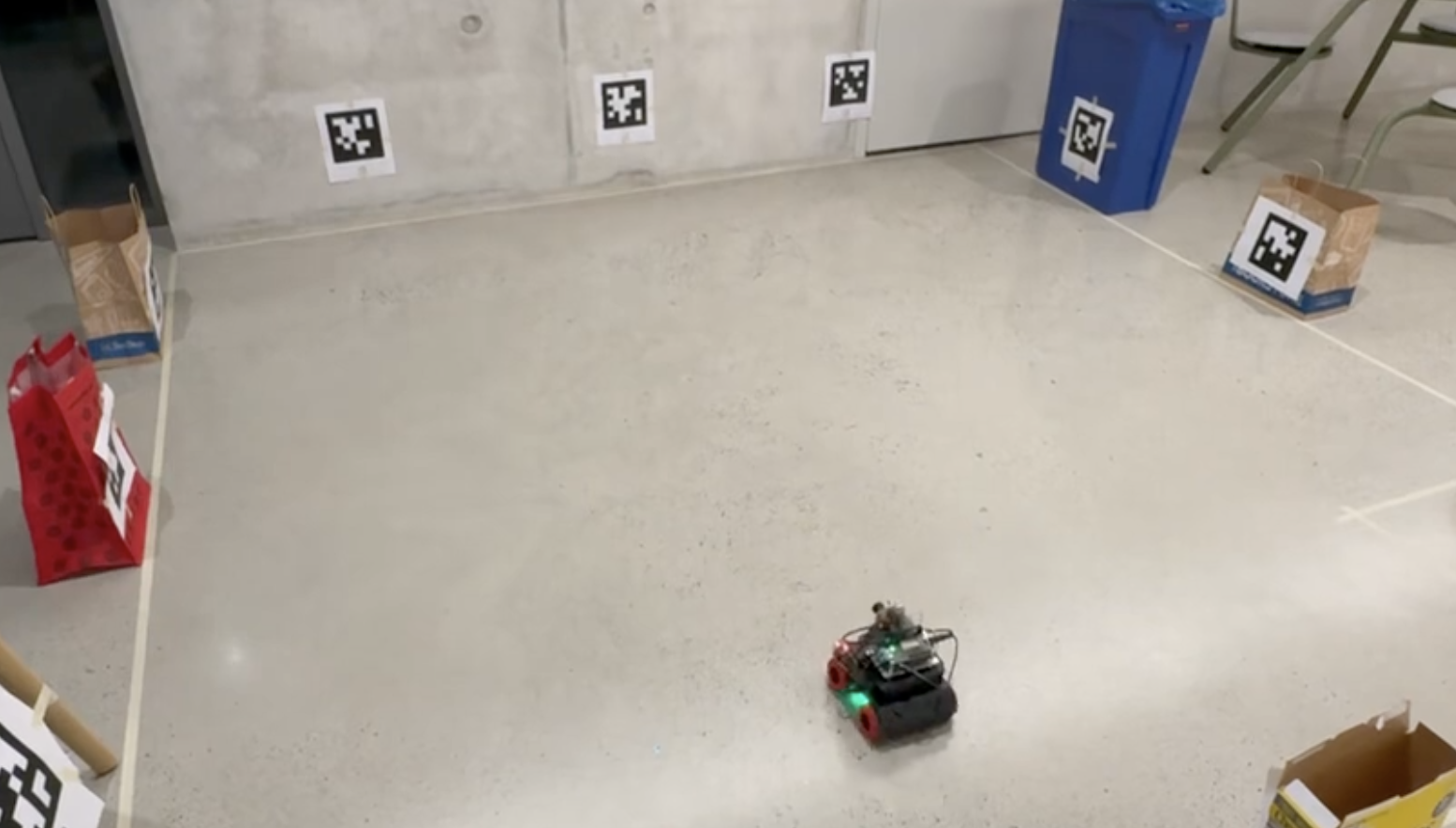
We developed a complete autonomous mobile robot system integrating EKF-SLAM for localization and mapping, path planning algorithms for obstacle avoidance, and behavior-based control for area coverage navigation.
M.S. in Computer Science | University of California San Diego
Sep. 2024 - June 2026 (expected)
Instructor, QI AI Entrepreneurship Program, Qualcomm Institute (CalIT2), July-Aug 2025 Instructor, QI AI Research-focused Program, Qualcomm Institute (CalIT2), Jan-Feb 2026